
Rapid ocean floor mapping is considered one of humanity’s grand challenges. Whereas satellites have allowed us to get a detailed and often real-time understanding of the Earth’s surface, which covers 29% of the globe, rapid ocean floor mapping means that the remaining 71% of the Earth’s surface could be better understood. To highlight this challenge, Xprise recently announced the finalists for its grand challenges competition to rapidly map the ocean floors.[1]
Increasing commercial, scientific, and military interests have driven this grand challenge, particularly as other parts of the globe can be more easily monitored. In addition, many new species, some of which could have medical benefits, could be found in the deepest parts of the oceans. There are also mineralogical and energy benefits as well, particularly if that energy could be harvested. Traditional methods for mapping have included seismic profiling, side-scan, magnetic and gravimetric measurements, and forms of bottom sampling. Such challenges and needs, however, were already evident in the 1970s, when researchers and others increasingly called for rapid ocean floor mapping. The challenge with these techniques and data gathering methods is to both share data while also utilize new technologies that can more quickly deploy and obtain new data as needed. In effect, it is developing something like we have with unmanned aerial vehicles except with underwater instruments that can penetrate the deepest parts of the oceans.[2]
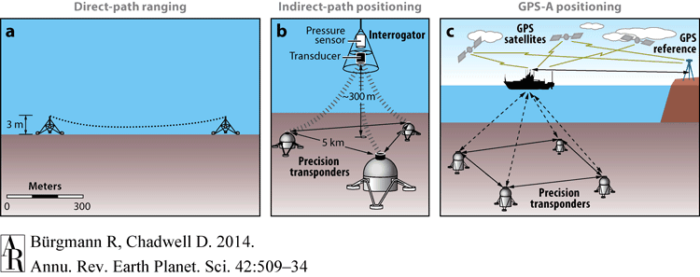
New tools have begun to provide more accurate geodetic data relevant for mapping the seafloors. These include acoustic ranging, pressure sensors, gravimeters, and multibeam sonars and seismic measures. Some of these sensors have been attached to autonomous submarines or underwater robots that can more continuously map areas of the ocean floors. This is particularly important for areas that are actively changing, particularly in volcanic regions such as islands along the so-called ‘Ring of Fire’ in the Pacific Ocean.[3]

Although the existing technologies can allow high detailed resolution of ocean floors, they are not adaptable to rapid changes or even constant deployment to remote areas. In effect, technologies need to become more autonomous, have longer-lasting fuel power, and better able to quickly measure at high precision remote regions. This has led to the grand challenge Xprize that is sponsored by Shell but also supplementary funding is given by the National Oceanic and Atmospheric Administration. The stated goals is to use high resolution bathymetric data to map specific objects that are of value for archaeological, biological and geological interests.[4]
So-called underwater drones are likely to increasingly be developed to harness existing and future technologies to meet challenges similar to those specified by the Xprize grand challenge. One identified challenge is that for underwater ‘drones,’ or forms of subversive vehicles including robot submarines, is how much autonomy is feasible relative to what an operator might see. The oceans often create more visibility issues that may limit an operator, while communication may also likely be cut off. Autonomous vehicles could be of great utility in difficult environments, but the limitation is that we often still do not always know what we are looking for and autonomous drones still need adequatet capabilities to transmit and receive relevant dat. Delays in communication is also an issue due to the medium in which the vehicles operate. The SEATONOMY is one project that is attempting to develop more autonomous underwater exploratory vehicles that effectively balance communication and autonomy.[5]
In general, we are seeing major changes in the ability to more rapidly monitor ocean floors. This includes mapping and creating vehicles that can gather data more easily. Grand challenges by Xprise are likely to aid in more rapid development in this area; however, there will continue to be challenges. As highlighted by SEATONOMY, communication to vehicles and autonomous capability remain a challenge not simply in terms of technology but also due to the nature of the environment in which devices operate within.
References
[1] For more on the Xprize announcement, see: https://oceandiscovery.xprize.org/press-release/nine-teams-advance-final-round-of-7m-shell-ocean-discovery-xprize.
[2] For more on instrumentation for ocean floor mapping that already called for rapid ocean floor mapping, see: Laughton, A.S., Roberts, D.G., and Graves, R. (1973). “Deep ocean floor mapping for scientific purposes and the application of automatic cartography“. International Hydrographic Review, 50 (1), 125-148.
[3] For more on new methods for mapping of the Ocean floor, see: Bürgmann, R., & Chadwell, D. (2014). Seafloor Geodesy. Annual Review of Earth and Planetary Sciences, 42(1), 509–534. https://doi.org/10.1146/annurev-earth-060313-054953.
[4] For more on the Xprize details, see: https://oceandiscovery.xprize.org/.
[5] For more on SEATONOMY, see: Grythe, K., Reinen, T. A., & Transeth, A. A. (2015). Autonomy levels versus communication in an underwater environment (pp. 1–8). IEEE. https://doi.org/10.1109/OCEANS-Genova.2015.7271482.